
You are here: Start » Program Examples » Camera Calibration and World Coordinates Calibration from Chessboard Grid
Camera Calibration and World Coordinates Calibration from Chessboard Grid
Aim
In this example a real-world positions of caliper tips are calculated and a distance between them. The caliper is lying on a flat surface, however the camera is not perpendicular to the surface, and also camera lens has non-negligible distortion.
Input
A set of images with camera calibration grid. An image of a calibration grid lying on the world plane. An image of the caliper.
Output
Real-world positions of caliper tips. Distance between caliper tips.
Hints
This example shows a typical problem of measurement in a real-world coordinate system.
-
Despite the camera lens and perspective distortions the vision analysis can be done on an input image.
-
After image point coordinates of caliper tips are found, they are transformed to real-world coordinates.
-
The necessary calibration data is calculated with help of a calibration gui.
Solution (Studio)
Macrofilter Main
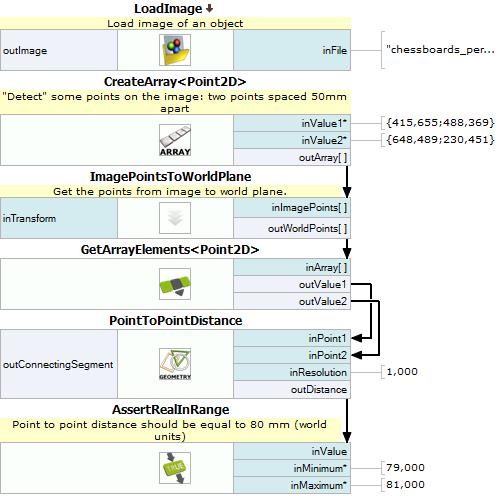
Used Filters
| Icon | Name | Description |
|---|---|---|
| GetArrayElements | Extracts up to 8 individual elements from an array. | |
| AssertRealInRange | Asserts that a real value fits the specified range. | |
| PointToPointDistance | Measures the distance between two points. | |
| ImagePointsToWorldPlane | Undistortion, image to world coordinate transformation. | |
| CreateArray | Creates an array from up to 8 individual objects. | |
| LoadImage | Loads a single image from a file. |
Further Readings
- Camera Calibration and World Coordinates - Detailed information about camera calibration and world coordinates.