
You are here: Start » User Interface » Creating Lens Undistortion Maps
Creating Lens Undistortion Maps
To calibrate camera for lens distortion an easy graphical tool can be used. The following steps must be taken:
- Add a UndistortImage filter to your program.
- Select the filter and click the "..." button by the inSpatialMap input in the Properties window. The calibration editor will open up.
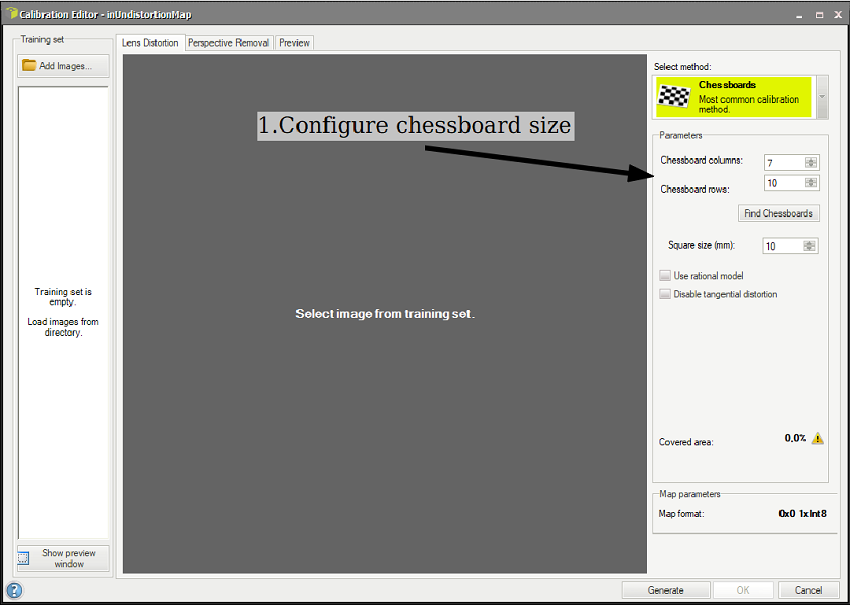
- Set the number of rows and columns of the chessboard grid:
-
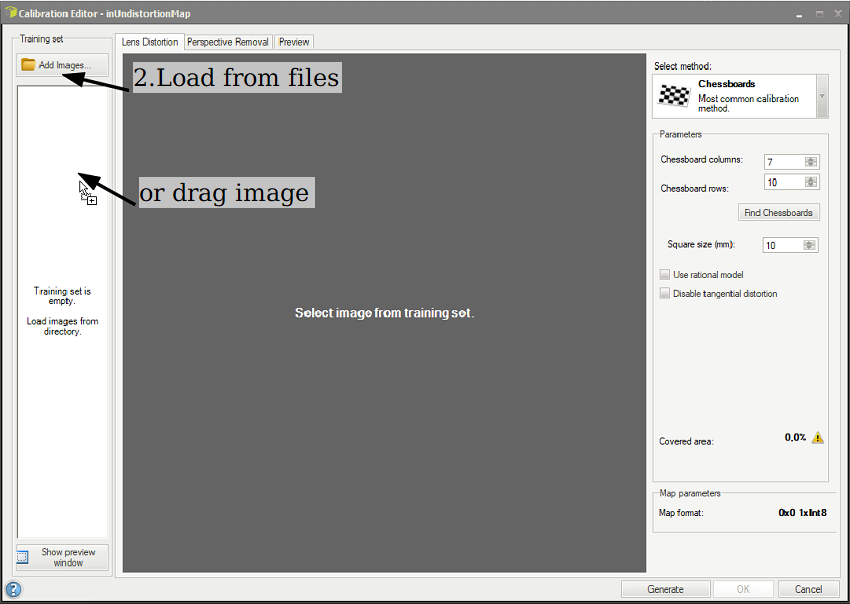
Collect input images for the calibration process by dragging some from the image selector at the top of the window
or by loading them from files.
- Select images which cover most of the input image area.
Only images with a detected grid should be selected.
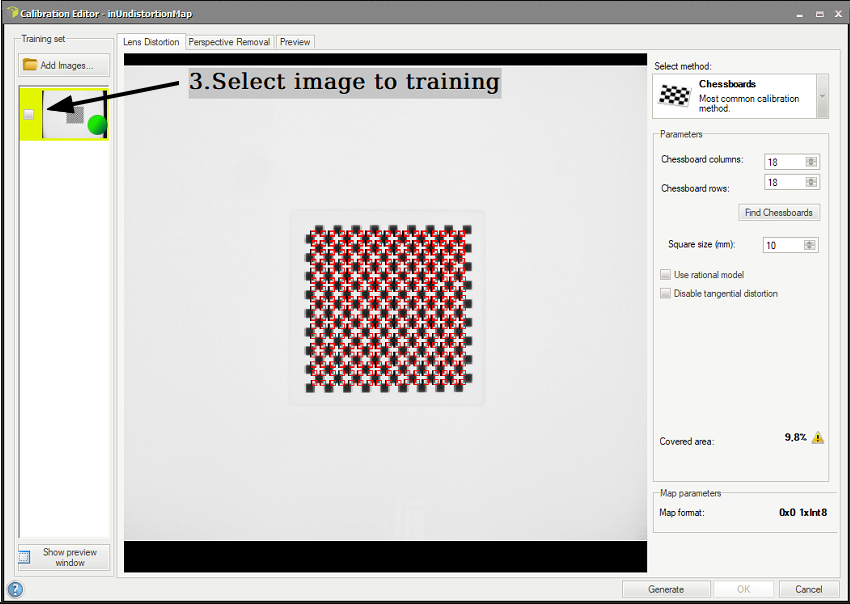
After the selection the area coverage is computed.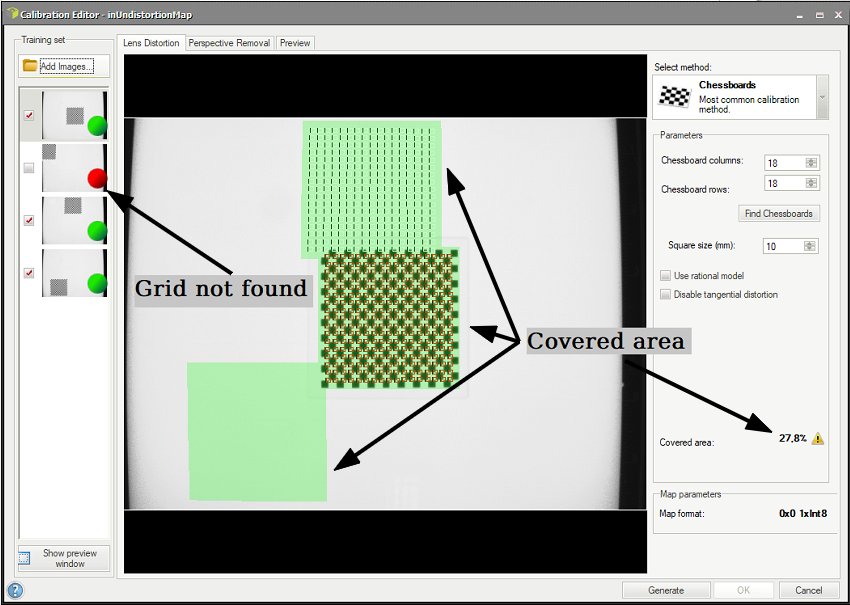
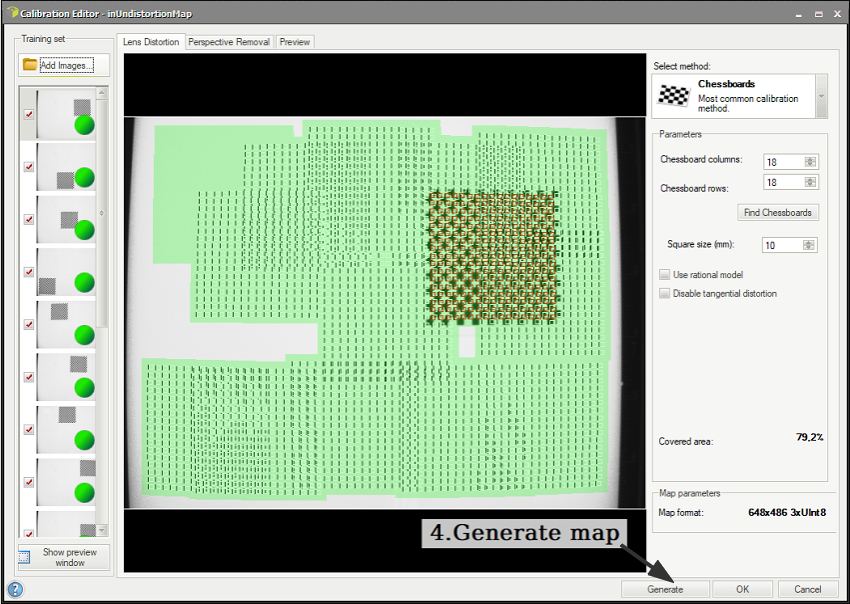
- Click "Generate" to generate a spatial map. Check the generation quality.
The calibration quality depends on the covered area and the quality of the calibration chessboard.
- Preview remapped images in the "Preview" tab.
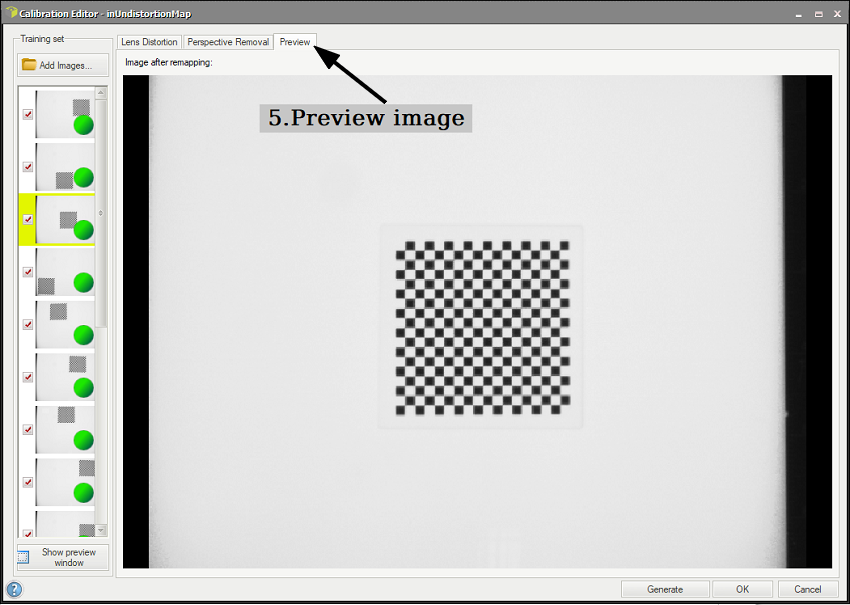
Tips on generating map:
- Try to cover at least 75% of the input image area. To get high quality results the chessboard grid should appear near all borders of the image.
- Avoid overlapping of the chessboard grids. These point will not improve the quality but will extend computation time.
- Put the chessboard not only at different locations, but also at different rotations.
- Reducing the number of images will reduce computation time.
- Always check results of remapping in the preview window. Provided invalid chessboard points can introduce a computation error, which can result in invalid calibration map.
| Previous: Creating Models for Template Matching | Next: Creating Text Segmentation Models |