Image
Description
The Image data type stores information about dimensions, pixel format and raw pixel values. The list of possible formats is similar to the one from the OpenCV library – there can be from 1 to 4 channels and 6 possible primitive types:
- sint8 - integer number from -128 to 127
- uint8 - integer number from 0 to 255
- sint16 - integer number from -32768 to 32767
- uint16 - integer number from 0 to 65535
- sint32 - integer number from -2147483648 to 2147483647
- real - real (floating point) number
For maximum flexibility handling of specific color spaces is left to appropriate filters.

A single-channel image. |

A 3-channel RGB image. |

A 3-channel HSV image displayed as RGB. |
Geometrical Coordinates
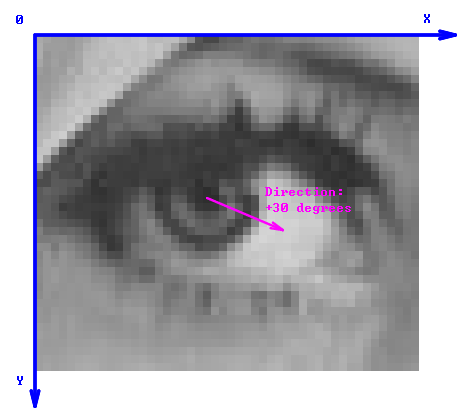
If w and h are the image dimensions, then all real-valued coordinates within the image are included in the ranges from 0.0 to w and from 0.0 to h (right-open). The top left pixel of the image covers the square area with the top-left corner at (0.0, 0.0) and the bottom-right corner at (w, h). The X axis is directed to the right, the Y axis downwards.
Angles are in degrees – from 0 to 360. For directions, the angle 0 denotes the direction of the X axis, i.e. the direction from left to right. The angles increase in the clock-wise manner.
Memory Representation
When writing user filters you need to know the memory representation of images. The pixel data of an image is stored in a continuous memory buffer of the following structure:
- First in the buffer comes the upper-left pixel.
- Then follow the remaining pixels of the first row.
- Channels are interleaved, i.e. all components of a single pixel are located at neighboring memory addresses.
- There might be a memory padding at the end of each row (including the last one) to improve memory alignment.
- The offset of the beginning of the k'th row is equal to 'k * pitch', where 'pitch' is the byte-distance between consecutive rows. Due to row padding this might be different than 'pixel_size * width'.
Remarks
- A region of interest, if required, is supposed to be provided as a separate object.
- Single image can allocate no more than 2GB of memory.
- Maximum image single dimension is 65535 (because regions use 16-bit integers for performance reasons).
Library Definition
class Image { protected: int width; // number of pixel columns int height; // number of pixel rows int pitch; // byte-distance between consecutive rows PlainType::Type type; // type of channels int depth; // number of channels ftl::Blob blob; // the pixel data int pixelSize; // byte-size of a pixel (computed from 'type' and 'depth') public: /// Constructor used for images, which will be created later, e.g. by 'LoadFromBmp' function Image(); /// Constructor used for creating new images Image( int width, int height, PlainType::Type type, int depth, ftl::Optional< const Region&&> inRoi ); /// Constructor used for creating wrappers on existing data Image( int width, int height, int pitch, PlainType::Type type, int depth, void* data ); /// Copying constructor. Performs deep data copy Image( const Image& rhs ); ~Image(); /// Deep data copy Image& operator = ( const Image& rhs ); void Reset(); /// Iff the format is different then recreates the image (pixel data will be own). /// Typically used for (re-)creating output images in image processing functions. void Reset( int width, int height, PlainType::Type type, int depth, ftl::Optional< const Region&&> inRoi ); void Reset( const Image& rhs, ftl::Optional< const Region&&> inRoi ); /// Turns the image into a wrapper of external data (pixel data will be NOT own) void Reset( int width, int height, int pitch, PlainType::Type type, int depth, void* data ); inline int Width () const; inline int Height() const; inline int Pitch () const; inline int Area () const; inline Box Frame() const; /// Number of channels (standard RGB images have 3) inline int Depth() const; /// Type of channels (standard RGB images have UINT8) inline PlainType::Type Type() const; inline PixelFormat Format() const; /// Size of pixels in bytes inline int PixelSize() const; /// Direct access to pixel data void* Data(); const void* Data() const; /// Returns pointer to pixels memory which since that point will /// be owned externally (this image will not delete it in the destructor). void* Release(); /// Helper method for range checking bool HasLocation( int x, int y ) const; bool HasLocation( Location p ) const; bool HasPoint( float x, float y ) const; int PtrToX( const void* ptr ) const; int PtrToY( const void* ptr ) const; /// Direct access to pixel data template < typename P&> P* RowBegin( int i ); template < typename P&> const P* RowBegin( int i ) const; template < typename P&> P* RowEnd ( int i ); template < typename P&> const P* RowEnd ( int i ) const; template < typename P&> P* Ptr( int x, int y ); template < typename P&> const P* Ptr( int x, int y ) const; template < typename P&> P* Ptr( const Location& p ); template < typename P&> const P* Ptr( const Location& p ) const; template < typename P&> P& Value( int x, int y ); template < typename P&> const P& Value( int x, int y ) const; template < typename P&> P& Value( const Location& p ); template < typename P&> const P& Value( const Location& p ) const; }
Methods:
int Width()- returns number of pixel columnsint Height()- returns number of pixel rowsint Pitch()- returns byte-distance between consecutive rowsPlainType Type()- returns type of pixel componentsint Depth()- returns number of channels
void* Data()- returns pointer to image data bufferT* RowBegin<T>( int i )- returns pointer to first element in image rowT* RowEnd<T>( int i )- returns pointer to first after last element in image rowT* Ptr<T>( int x, int y )- returns pointer to element at specified coordinatesT& Value<T>( int i )- allows to access pixel value at specified coordinates